Level-set method¶
Introduction¶
The level-set method is a method designed for modeling material interaction. The main idea is based on a function \(l\), which satisfies the following.
We will focus only on the interaction between two incompressible Navier-Stokes equations with different constant parameters \(\rho_i, \mu_i \in \Omega_i\) for \(i \in \{ 1, 2 \}\). The function \(l\) allows us to define viscosity \(\mu\) and density \(\rho\) in the whole domain \(\Omega\) as a single function
and
Because we would like to solve the evolution problem, the \(\Omega_i\) and the function \(l\) have to depend on time. We want \(l\) to be constant along streamlines for the prescribed velocity field \(v\). This condition is satisfied if
We can now formulate the whole system, firstly in the strong sense.
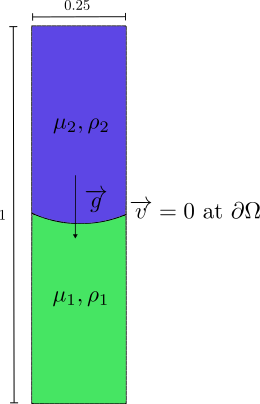
Rayleigh-Taylor Example¶
Let us assume a rectangular domain with two fluids as it is desctibed in the figure below. We will cosidere Navier-Stokes fluid for both of them. The fluids will stick on the boundary of the domain, so \(v = 0\) at \(\partial \Omega\).
Implementation¶
[1]:
import dolfin as df
import matplotlib.pyplot as plt
Then we define the mesh.
[2]:
mesh = df.RectangleMesh(
df.Point(0.0, -0.5), df.Point(0.25, 0.5), 20, 80, 'crossed'
)
df.plot(mesh)
plt.show()
We define the initial conditions for velocity and levelset.
[3]:
class InitialCondition(df.UserExpression):
def __init__(self, **kwargs):
self.center = [0.125, 0.25]
self.radius = df.sqrt(0.125**2 + 0.25**2)
super().__init__(**kwargs)
def r(self, x: list) -> float:
return df.sqrt((x[0] - self.center[0])**2 + (x[1] - self.center[1])**2)
def eval(self, values, x):
values[0] = 0.0 # v_x
values[1] = 0.0 # v_y
values[2] = 0.0 # p
values[3] = self.r(x) - self.radius # l
def value_shape(self):
return (4, )
# create instance of the class.
# initial_conditions = InitialCondition()
class InitialConditionSigmoid(df.UserExpression):
def __init__(self, **kwargs):
self.center = [0.125, 0.25]
self.radius = df.sqrt(0.125**2 + 0.25**2)
self.eps = 0.001
super().__init__(**kwargs)
def r(self, x: list) -> float:
return df.sqrt((x[0] - self.center[0])**2 + (x[1] - self.center[1])**2)
def eval(self, values, x):
values[0] = 0.0 # v_x
values[1] = 0.0 # v_y
values[2] = 0.0 # p
values[3] = 1 / (1 + df.exp(min((self.radius - self.r(x) ) / self.eps, 10)))
# values[3] = 1 / (df.exp( (self.r(x) - self.radius) / self.eps ))
def value_shape(self):
return (4, )
initial_conditions = InitialConditionSigmoid()
Then we define approximation of the signum function as
[4]:
# def sign(q: df.Function, eps: float):
# return q / df.sqrt(q * q + eps * eps * df.inner(df.grad(q), df.grad(q)))
def sign(q: df.Function, eps: float):
return 2 * (q - 0.5)
Further we create the function spaces. We use “CG” for each subspace.
[5]:
elements = [
df.VectorElement("CG", mesh.ufl_cell(), 2), # velocity
df.FiniteElement("CG", mesh.ufl_cell(), 1), # pressure
df.FiniteElement("CG", mesh.ufl_cell(), 1) # levelset
]
function_space = df.FunctionSpace(
mesh, df.MixedElement(elements)
)
Now we define all the constants.
[6]:
material_params = {
"mu1": 1.0,
"mu2": 1.0,
"rho1": 500,
"rho2": 1000,
}
eps = 1e-4
dt = 0.02
t_start = 0.0
t_end = 1.0
g = df.Constant((0.0, -10.0)) # gravity field
Further, we create the boundary conditions for velocity. In particular we require that \(v = 0\) on the whole boundary of the domain.
[7]:
bcs = [
df.DirichletBC(
function_space.sub(0), # v
df.Constant((0.0, 0.0)),
"on_boundary"
)
]
Now we define the funcions on our space and interpolate the initial condition on the space.
[8]:
w = df.Function(function_space) # unknown
w0 = df.Function(function_space) # from previous step
phi = df.TestFunction(function_space) # test function
w0.assign(df.interpolate(initial_conditions, function_space))
w.assign(w0)
# Split functions
v, p, l = df.split(w)
v0, p0, l0 = df.split(w0)
phi_v, phi_p, phi_l = df.split(phi)
We will need to formulate the functions \(\rho\) and \(\mu\).
[9]:
def rho(params: dict, l: df.Function, eps: float, sign):
return (
params["rho1"] * 0.5* (1.0 + sign(l, eps))
+ params["rho2"] * 0.5 * (1.0 - sign(l, eps))
)
def mu(params: dict, l: df.Function, eps: float, sign):
return (
params["mu1"] * 0.5 * (1.0 + sign(l, eps))
+ params["mu2"] * 0.5 * (1.0 - sign(l, eps))
)
It is time to write down the equations.
[10]:
n = df.FacetNormal(mesh)
h = df.CellDiameter(mesh)
h_avg = (h('+') + h('-')) / 2.0
alpha = df.Constant(0.1)
cauchy_green = (
mu(material_params, l, eps, sign) * (df.grad(v) + df.grad(v).T)
- p * df.Identity(mesh.topology().dim())
)
material_detivative = (
(1 / dt) * df.inner(v - v0, phi_v) # partial time derivative
+ df.inner(df.grad(v) * v, phi_v) # convective therm
)
momentum = (
rho(material_params, l, eps, sign) * material_detivative*df.dx
+ df.inner(cauchy_green, df.grad(phi_v))*df.dx
- rho(material_params, l, eps, sign)
* df.inner(g, phi_v) * df.dx
)
mass = (
df.div(v) * phi_p*df.dx
)
levelset_convection = (
(1 / dt) * df.inner(l - l0, phi_l) * df.dx
+ df.div(l * v) * phi_l * df.dx
)
stabilization = (
alpha('+') * (h_avg**2)
* df.inner(df.jump(df.grad(l), n), df.jump(df.grad(phi_l), n)) * df.dS
)
pde_form = momentum + mass + levelset_convection + stabilization
Our system is not linear, thus we need to solve it with Newton solver. Let’s define it now!
[11]:
# Set Newton-solver
# form compiler parameter
ffc_options = {
"quadrature_degree": 4,
"optimize": True,
"eliminate_zeros": True
}
J = df.derivative(pde_form, w)
problem = df.NonlinearVariationalProblem(pde_form, w, bcs, J, ffc_options)
solver = df.NonlinearVariationalSolver(problem)
prm = solver.parameters
prm['nonlinear_solver'] = 'newton'
prm['newton_solver']['linear_solver'] = 'mumps'
prm['newton_solver']['lu_solver']['report'] = False
prm['newton_solver']['absolute_tolerance'] = 1E-10
prm['newton_solver']['relative_tolerance'] = 1E-10
prm['newton_solver']['maximum_iterations'] = 20
prm['newton_solver']['report'] = True
We create the XDMF files for storing the results.
[12]:
# Initialize the files for writing the results
files = []
for name in ['v', 'p', 'l']:
with df.XDMFFile(df.MPI.comm_world, f"result/{name}.xdmf") as xdmf:
xdmf.parameters["flush_output"] = True
files.append(xdmf)
It remains to solve it!!
[ ]:
t = t_start
while t < t_end:
df.info(f"t = {t}")
solver.solve()
w0.assign(w)
t += dt
# write the time-step into the file
for func, name, xdmf in zip(w.split(True), ['v', 'p', 'l'], files):
func.rename(name, name)
xdmf.write(func, t)
Complete Code¶
[ ]:
import dolfin as df
import matplotlib.pyplot as plt
mesh = df.RectangleMesh(
df.Point(0.0, -0.5), df.Point(0.25, 0.5), 20, 80, 'crossed'
)
df.plot(mesh)
plt.show()
class InitialCondition(df.UserExpression):
def __init__(self, **kwargs):
self.center = [0.125, 0.25]
self.radius = df.sqrt(0.125**2 + 0.25**2)
super().__init__(**kwargs)
def r(self, x: list) -> float:
return df.sqrt((x[0] - self.center[0])**2 + (x[1] - self.center[1])**2)
def eval(self, values, x):
values[0] = 0.0 # v_x
values[1] = 0.0 # v_y
values[2] = 0.0 # p
values[3] = self.r(x) - self.radius # l
def value_shape(self):
return (4, )
# create instance of the class.
# initial_conditions = InitialCondition()
class InitialConditionSigmoid(df.UserExpression):
def __init__(self, **kwargs):
self.center = [0.125, 0.25]
self.radius = df.sqrt(0.125**2 + 0.25**2)
self.eps = 0.001
super().__init__(**kwargs)
def r(self, x: list) -> float:
return df.sqrt((x[0] - self.center[0])**2 + (x[1] - self.center[1])**2)
def eval(self, values, x):
values[0] = 0.0 # v_x
values[1] = 0.0 # v_y
values[2] = 0.0 # p
values[3] = 1 / (1 + df.exp(min((self.radius - self.r(x) ) / self.eps, 10)))
# values[3] = 1 / (df.exp( (self.r(x) - self.radius) / self.eps ))
def value_shape(self):
return (4, )
initial_conditions = InitialConditionSigmoid()
# def sign(q: df.Function, eps: float):
# return q / df.sqrt(q * q + eps * eps * df.inner(df.grad(q), df.grad(q)))
def sign(q: df.Function, eps: float):
return 2 * (q - 0.5)
elements = [
df.VectorElement("CG", mesh.ufl_cell(), 2), # velocity
df.FiniteElement("CG", mesh.ufl_cell(), 1), # pressure
df.FiniteElement("CG", mesh.ufl_cell(), 1) # levelset
]
function_space = df.FunctionSpace(
mesh, df.MixedElement(elements)
)
material_params = {
"mu1": 1.0,
"mu2": 1.0,
"rho1": 500,
"rho2": 1000,
}
eps = 1e-4
dt = 0.02
t_start = 0.0
t_end = 1.0
g = df.Constant((0.0, -10.0)) # gravity field
bcs = [
df.DirichletBC(
function_space.sub(0), # v
df.Constant((0.0, 0.0)),
"on_boundary"
)
]
w = df.Function(function_space) # unknown
w0 = df.Function(function_space) # from previous step
phi = df.TestFunction(function_space) # test function
w0.assign(df.interpolate(initial_conditions, function_space))
w.assign(w0)
# Split functions
v, p, l = df.split(w)
v0, p0, l0 = df.split(w0)
phi_v, phi_p, phi_l = df.split(phi)
def rho(params: dict, l: df.Function, eps: float, sign):
return (
params["rho1"] * 0.5* (1.0 + sign(l, eps))
+ params["rho2"] * 0.5 * (1.0 - sign(l, eps))
)
def mu(params: dict, l: df.Function, eps: float, sign):
return (
params["mu1"] * 0.5 * (1.0 + sign(l, eps))
+ params["mu2"] * 0.5 * (1.0 - sign(l, eps))
)
n = df.FacetNormal(mesh)
h = df.CellDiameter(mesh)
h_avg = (h('+') + h('-')) / 2.0
alpha = df.Constant(0.1)
cauchy_green = (
mu(material_params, l, eps, sign) * (df.grad(v) + df.grad(v).T)
- p * df.Identity(mesh.topology().dim())
)
material_detivative = (
(1 / dt) * df.inner(v - v0, phi_v) # partial time derivative
+ df.inner(df.grad(v) * v, phi_v) # convective therm
)
momentum = (
rho(material_params, l, eps, sign) * material_detivative*df.dx
+ df.inner(cauchy_green, df.grad(phi_v))*df.dx
- rho(material_params, l, eps, sign)
* df.inner(g, phi_v) * df.dx
)
mass = (
df.div(v) * phi_p*df.dx
)
levelset_convection = (
(1 / dt) * df.inner(l - l0, phi_l) * df.dx
+ df.div(l * v) * phi_l * df.dx
)
stabilization = (
alpha('+') * (h_avg**2)
* df.inner(df.jump(df.grad(l), n), df.jump(df.grad(phi_l), n)) * df.dS
)
pde_form = momentum + mass + levelset_convection + stabilization
# Set Newton-solver
# form compiler parameter
ffc_options = {
"quadrature_degree": 4,
"optimize": True,
"eliminate_zeros": True
}
J = df.derivative(pde_form, w)
problem = df.NonlinearVariationalProblem(pde_form, w, bcs, J, ffc_options)
solver = df.NonlinearVariationalSolver(problem)
prm = solver.parameters
prm['nonlinear_solver'] = 'newton'
prm['newton_solver']['linear_solver'] = 'mumps'
prm['newton_solver']['lu_solver']['report'] = False
prm['newton_solver']['absolute_tolerance'] = 1E-10
prm['newton_solver']['relative_tolerance'] = 1E-10
prm['newton_solver']['maximum_iterations'] = 20
prm['newton_solver']['report'] = True
# Initialize the files for writing the results
files = []
for name in ['v', 'p', 'l']:
with df.XDMFFile(df.MPI.comm_world, f"result/{name}.xdmf") as xdmf:
xdmf.parameters["flush_output"] = True
files.append(xdmf)
t = t_start
while t < t_end:
df.info(f"t = {t}")
solver.solve()
w0.assign(w)
t += dt
# write the time-step into the file
for func, name, xdmf in zip(w.split(True), ['v', 'p', 'l'], files):
func.rename(name, name)
xdmf.write(func, t)